
连年来,对于自动驾驶工夫的话题激勉了往常存眷,其发展飞速,正在深入改造着东说念主们的生涯款式。特斯拉的全自动驾驶系统(FSD)、华为的智能驾驶系统(ADS)以及国内车企自研或相助研发的智能驾驶工夫,各具特质,各有优劣。看成又名资深工程师初中萝莉液液酱,浅显聊聊我眼中的智能驾驶系统。
 1. 讲一个航空事故的故事,再来望望汽车的所谓自动驾驶。
1. 讲一个航空事故的故事,再来望望汽车的所谓自动驾驶。我们都知说念航空安全是比汽车安全几个数目级的。我们通过一个特例来类比两个鸿沟的自动驾驶系统,看它到底是不是安全的
2008年2月23日,好意思国空军部署在关岛安德森基地的一架B-2隐身轰炸机“堪萨斯精神号”,腾飞不久后便坠毁在跑说念上。在此之前也曾安全投军19年,参加3起构兵都毫发无损。即便如斯安全的飞机也遇到了“安全驾驶联想的遮掩问题”,变成的坠毁,也变成了有史以来最腾贵的空难。一架价值24亿好意思元的顶尖隐身轰炸机!航行员跳伞逃生,若是是汽车,驾驶员莫得任何逃生契机。详备了解可以去B站看完好版“【ACICFG】空中大难S22E03:2008年安德森空军基地B-2轰炸机坠毁事件”。

事故原因:飞机在停机坪淋雨,变成3个传感器故障,腾飞时机载经营机使用了特殊数据,大角度昂首,航行员推主管杆并加大最大油门,也没能援助飞机,终末失速坠毁。
联想工程师为保证数据的可靠性,秉承了24个大气数据传感器,分组后产生4组数据流,若是数据流发生冲突,机载电脑就会遴荐其中的2组进行处理,也即是抹杀特殊数据,留住正确数据。扬弃经营机收用了特殊数据,这一个小BUG导致了24亿的飞机坠毁。

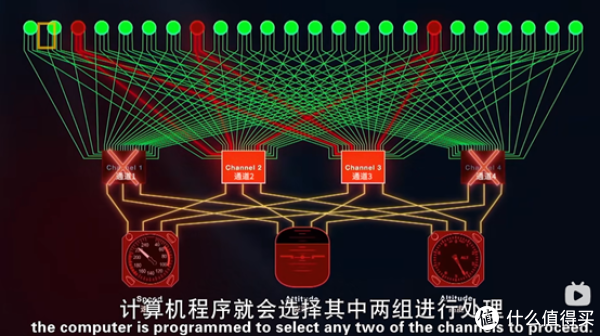
这是一架作念了严谨联想和完好考据,并资格了19年投军,有专科东说念主员抠门,最顶尖的航行员驾驶的飞机,尚且发生了如斯严重的事故。你笃信哪个车企能作念到飞机联想同样的严谨,哪个4S店作念到机务同样的抠门,来保险你的安全?照旧你比航行员有更快更准的反应速率?军机在无力回天时,还有弹射逃生,而你坐在汽车里只消眼看着等死。
那么你可以把我方的人命交给当今的所谓的“自动驾驶”吗?
2. 最浅显的智能驾驶:我们从最浅显的智能驾驶驱动提及,那即是“定速巡航”或者“ACC自稳健巡航”,它们在早期油车的高配车型上建设较多,相配于L2级的自动驾驶。
定速巡航:相配于机器自动帮你踩油门,限度车速到设定的值。王人备不管路况,只管车速恒定。它的使命旨趣提及来不算复杂,主要依靠车辆上的传感器与限度单位协同运作。当我们开车在路况精致的说念路上,按下定速巡航的开关,并设定好渴望的速率数值后,车速传感器就驱动阐述关节作用了。它会捏续阻挡地监测车辆的骨子行驶速率,然后将检测到的脉冲信号传送给汽车的电子限度单位(ECU),ECU在限度发动机,使车速保捏恒定。
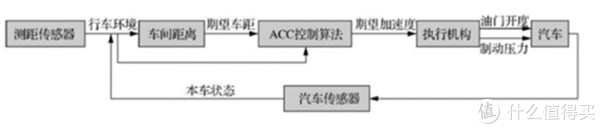
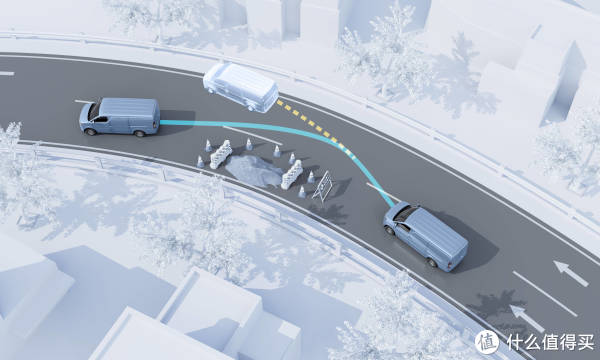
ACC自稳健巡航:在定速巡航系统的基础上,加向前车距离传感器,当与前车距离近以后自动放慢,并保捏安全距离。

定速巡航为保证安全,限度逻辑应是最先级别,它应在东说念主为过问即退出:取消按键、踩刹车、手刹等。
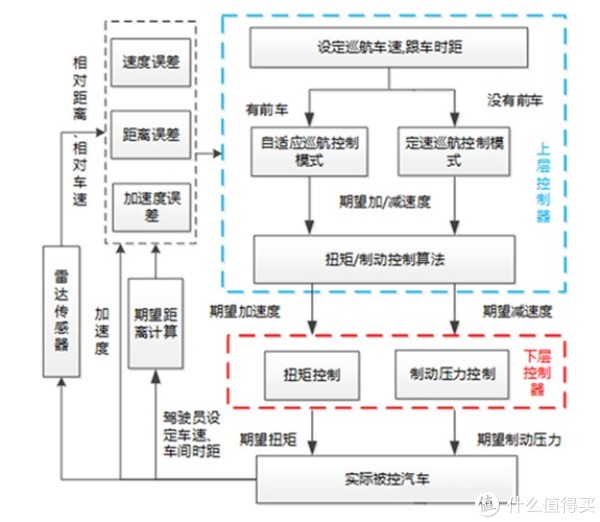
浅显的自动驾驶其实算法上也曾相比复杂了,要取得速率、距离、加快度、扭矩、制能源等状态,解算出速率错误、距离错误、加快度错误,再算出渴望的扭矩和制能源。还要求系统在毫秒级算好,并作出反应,不然可能车知说念要延缓了,然而没来得及延缓就撞上去了。
即使这样浅显的系统也存在失效的风险,早期就有多起事故车辆干涉定速状态后不成退出。传感器、限度单位和施行器,某一个部件损坏,这时进修车企的联想智商的就来了,故障检测或者限度逻辑联想造作就可能会导致车辆保捏高速行驶,致使车速不受控的一直提高,变成危急。
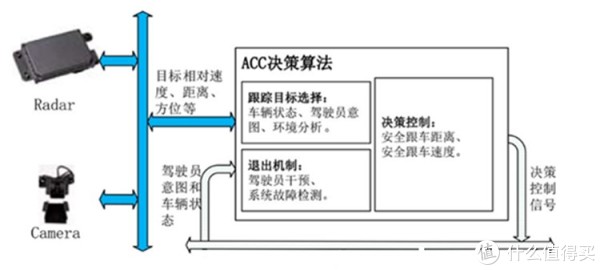
3. 目下的智驾系统水平面前的智驾系统有特斯拉的全自动驾驶系统(FSD)、华为的智能驾驶系统(ADS)以及国内车企自研或相助研发的智能驾驶工夫,各具特质,各有优劣。目下的智能驾驶系统融入了最新的视觉传感器或者激光雷达,通过算法,大约在一定进度上识别路上的行东说念主、车辆、禁绝物、交通标线和信号灯。有了环境信息再通过决策算法判断车辆的加延缓、行驶想法等限度逻辑,在许多时候可以匹配舆图或者离开舆图扫尾车辆的自动行驶和自动泊车。然而不管哪家公司宣传的L2.99、L3++, 照旧在L4级别上取得了进展, 照旧L4级别在测试中初中萝莉液液酱,都莫得东说念主敢说我方的L4达到了商用圭表。
对于一个老练的驾驶员,眼中看到周围的景物,脑中作念出判断,简直是一种本能反应,简直不需要时辰或者证据。而智驾系统是要先完成物体的解算,再作念决策,借助于高速CPU和GPU来完成经营,还要通过数字总线传递信息给动作部件扫尾车辆的限度。高阶的自动驾驶会引入更多的变量,并要求系统快速解算,经营量呈几何级数级的爆涨。更进攻的是要对多个身分进行排序,分袂出哪个是恫吓最大的,应怎样作出应付法子,再验算应付法子可能导致的后果。对运算速率和算法的要求就相配高了。现代经营器和东说念主脑来比,在某些固定鸿沟(比如复杂经营、棋战、产线上的自动限度)经过深度开荒可以突出东说念主脑,然而发散性和创造性的念念维,还远远够不上。致使当今也曾大鸿沟引入东说念主工智能的鸿沟,比如接线员我愿意说它是智障,大部分时辰不成处分问题,就反复重迭那几句话;比如打车的派单系统,明明周围有司机还要我等五分钟调几公里外的车过来;比如12306和病院挂号系统,这样多年和黄牛斗智斗勇即是干不外。。。说远了,转头不时说智驾。
智驾算法竭力于去效法驾驶员的反应,特等是近几年神经集结和大数据的学习快速发展,可以给智驾提供坚实的基础。早期的算法可以说是浅显调皮,比如算到车速差(目的速率-面前速率),就平直大油门加快,车速差快到零了再刹一脚,进展出来即是车辆不是加快即是延缓,快速退换,搭车东说念主晕车即是这样来的。驾驶员是眼睛看出去几公里,不单是看前一辆车,若是三四辆车之前的车刹车灯亮了,那我就也曾驱动松油门,再不雅察距离看是否需要踩刹车;我会不雅察前线车说念的车辆密度,看哪个车说念的速率最快;我会不雅察前边几辆车的驾驶俗例,若是慢吞吞的,我就不跟在他后头;我会不雅察大卡车是否有变说念的倾向,前线堵车后头有莫得大卡车跟在屁股后头不够安全距离,若是它冲过来我还有莫得侧目的空间。统共的这些分析判断,在看到景物的须臾也曾在脑子里判断结束。而智驾系统能作念到几个就不知所以了,能把跟车和变说念作念好,大家都在快乐了。
路面情况的复杂进度是本领无法先见的,是以是没观点通过学习涵盖统共路上可能发生的情景。好意思国东说念主迹罕至,大部分时刻都没那么拥挤;德国不限速高速虽说速率快,然而东说念主员驾驶训诫好,莫得龟速和乱变说念,安全性也很高;中国就复杂了,各式路段毫不换取,好的不必说,差的场地才是易发生危急的,鬼探头、龟速行驶和乱泊车、路面杂物、施工不范例、路面马虎等等都危及到自动驾驶的安全。遇到顶点情况下,比如掉了个轮胎,掉了块钢板,智驾是否大约识别出来的,然后作念出决断,是压已往、绕已往照旧停驻来,够不够距离反应,后车是否有危急。智驾系统算出来的阶梯,汽车的硬件是否救助快速反应,完成预定的轨迹。
智驾是波及到东说念主身安全的,你可以一万次运行正常,大家抖擞的体验。然而一次造作就带走了东说念主的人命。是以但愿车企对此有敬畏之心,不要过度宣传和误导。
午夜伦理伦理片在线观4. 自动驾驶,是传感器多就安全吗?目下主流的智驾工夫处分决议有2种:视觉决议,激光雷达决议。有不雅点以为车联想多放几个激光雷达就比视觉决议高等,抛开资本不谈,只谈传感器能否带来安全。
面前主流的智驾系统有两个主流决议,还有把两个交融的决议其实哪个都没作念好。其实抛开传感器的参数和算法去谈哪个决议好都是耍流氓。
1. 视觉决议
上风:- 高分袂率图像捕捉细节(如交通象征、行东说念主感情),合适复杂城市环境。
- 通过深度学习模拟东说念主类驾驶决策,具备“类东说念主”驾驶逻辑。
弱势:- 依赖光照要求,夜间、雨雾天性能下跌;深度感知需算法推算,精度低于激光雷达。
2. 激光雷达决议
上风:- 厘米级测距精度,360°三维点云建模,恶劣天气下踏实性强。
- 减少对算法的依赖,简化及时决策经由。
弱势:- 点云数据分袂率低,难以识别脸色和纹理细节;体积大,影响车辆联想。
早期的录像头成像精度差,其后发展环顾录像头、多目视觉交融、高像素和多光谱录像头。
激光雷达的采样频率、角分袂率、测距精度也有了长足的进展。价钱从大几万缩短到一千多。
传感器看成前端集结,目的都是能准确取得环境信息。那么车辆是怎样分袂前边是一张纸照旧一块铁,录像头是通过脸色厚度纹理来猜,激光雷达通过点云来猜,猜即是通过算法学习,若是你以前喂给它的数据是准确的,它猜得就准一些。然后决策算法以为纸是莫得危急的,而铁块是需要绕行的。
越高等的智能驾驶就越依赖算法的准确。而某些车企是不具备算法智商,想要复制手机堆传感器那一套作念法,宣传上占据制高点,那是不顾用户的人命安全,出问题是势必的,出了问题再攻关。
智能驾驶功能为提拔驾驶系统,驾驶员需弥远保捏对车辆的限度。说白了即是宣传的时候是智能驾驶,出事故时候是提拔驾驶,照旧驾驶员认真。想要我笃信自动驾驶,除非车企和干系部门经过测试以为满盈安全了,取消了想法盘和油门刹车,出了事故一说念由车企认真。所稀有据交由“颓唐的第三方”读取和分析。即使这样也不成王人备幸免事故,然而可以通过模拟和测算,得到事故概率,比如:1次幽微事故/每10000公里/每车,1次紧要事故/每10000公里/每1000车。
4. 自动驾驶的算法我以为自动驾驶系统要有以下算法构成,无论车企给它起什么魁伟上的名字,或者走什么工夫阶梯,保证准确度和及时都是它的中枢需求。
目的检测:通过录像头或激光雷达,将集结的信号归附成环境中的物体、标线标牌、信号灯状态。
交融算法:多信息源合成最终的果真环境
展望算法:展望其他交通参与者(车辆、行东说念主)的畴昔轨迹。
打算算法:连合舆图与展望扬弃,生成安全旅途(如变说念、延缓)。
限度算法:将旅途滚动为油门、刹车、转向教导。
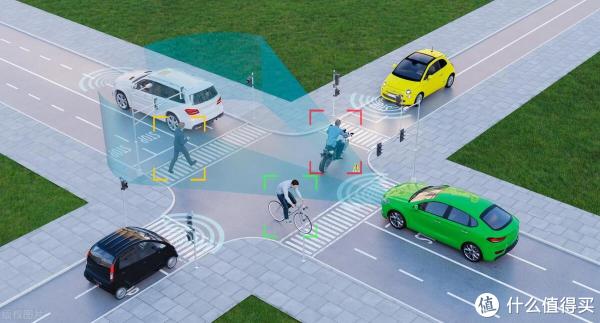
面前保证目的检测照旧最难的,要归附果真的寰宇环境,它波及光学、电子学、信号识别和处理、三维建模等;其次决策亦然个贫窭,哪些是安全的可以开已往?哪些情况需要遁藏?哪些需要等对方遁藏,若是不遁藏若那儿理?还有伦理问题,若是避无可避,一边有一个东说念主,一边是一堆东说念主,撞哪个?算法要具备自学习,不然遇到莫得喂给它的场景它就傻了,那亦然不行的!
总的来说,面前的智能驾驶工夫仍主要局限于提拔驾驶功能,而实在扫尾自动驾驶的系统,尚需龙套传感器和算法的限度,不成宽心的把我方的人命交付给一个大部分时辰看起来可以初中萝莉液液酱,偶尔抽一下风的系统。智能驾驶系统天然在擢升驾驶扬弃和减少交通事故方面阐述了一定的作用,但它是波及到东说念主身安全的,偶尔失效也会导致东说念主员伤一火和紧要蚀本。其中枢依赖于先进的智能算法和传感器工夫,而非浅显的“传感器堆叠”或“告白宣传”。实在自动驾驶需要敬小慎微雕刻前行,确保系统既大约应付复杂环境,又大约保险驾驶东说念主和交通参与者的安全。